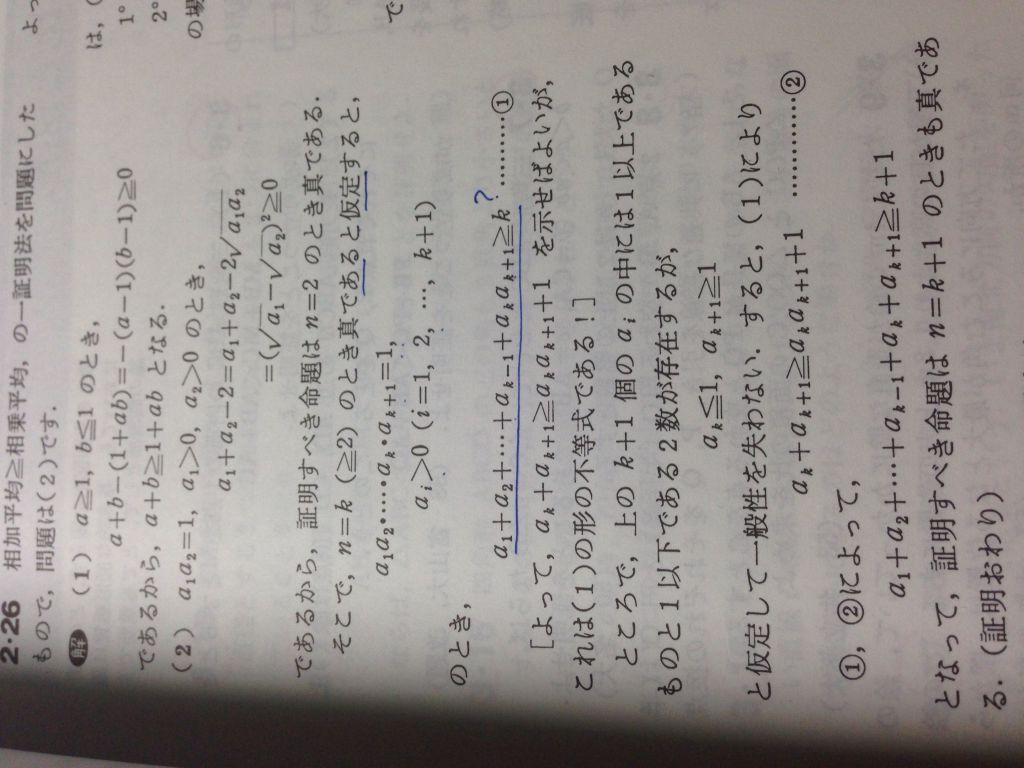
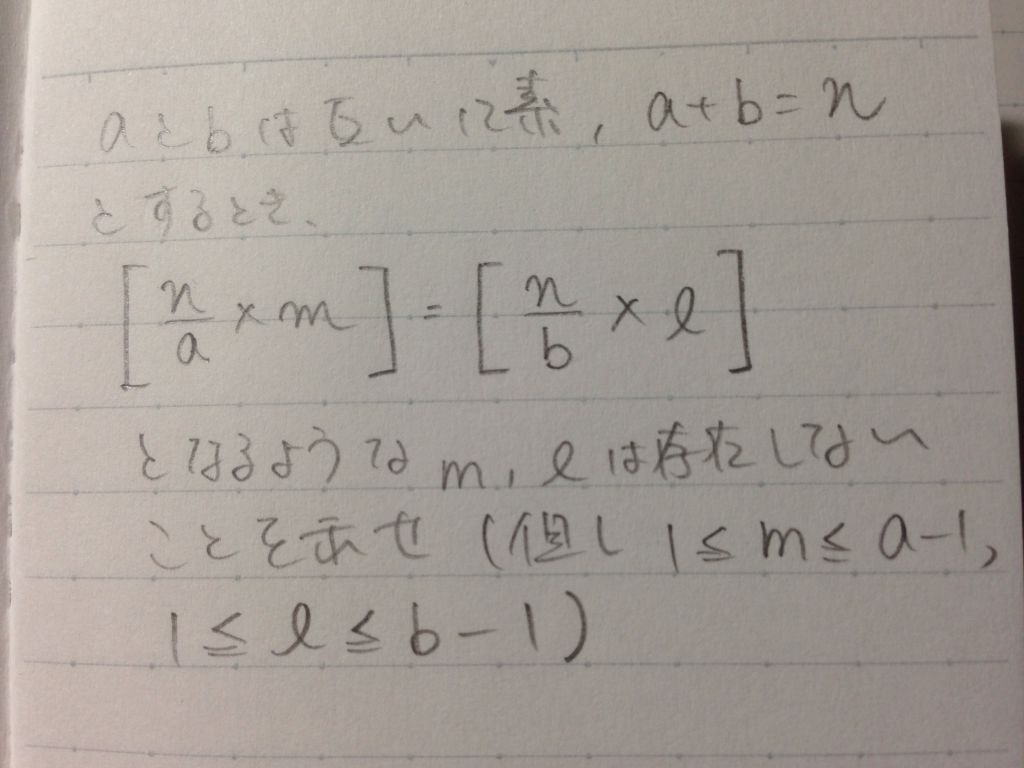
次の問題が示せません、、
互いに素ということをうまく使うのだろうとはおもうのですが、、
![]() |
No.25367 - 2014/04/07(Mon) 20:34:17
| ☆ Re: / みずき | | | 『aとbは互いに素』とあるのと、a,b≧2とより、
a,bは自然数であると解釈します。
a=2,b=3,n=5,m=1,l(エル)=3/2の場合に
本問の主張と矛盾する結果が生まれるので、
m,nは自然数であると解釈します。
命題Aを「aとbは互いに素である」
命題Bを
「a+b=nかつ1≦m≦a-1かつ1≦l≦b-1かつ
[nm/a]=[nl/b]を満たすm,nは存在しない」
とするとき、本問の主張は、
『AならばB』です。
直接的な証明は思いつきませんでしたが、
対偶『BでないならばAでない』
を示すことなら、それほど難しくないと思います。
|
No.25368 - 2014/04/07(Mon) 21:15:10 |
| ☆ Re: / みずき | | | 細かいことですが、私の文章の中に
誤りがありましたので、訂正します。
誤
a=2,b=3,n=5,m=1,l(エル)=3/2の場合に
本問の主張と矛盾する結果が生まれるので、
m,nは自然数であると解釈します。
命題Aを「aとbは互いに素である」
命題Bを
「a+b=nかつ1≦m≦a-1かつ1≦l≦b-1かつ
[nm/a]=[nl/b]を満たすm,nは存在しない」
とするとき
正
a=2,b=3,n=5,m=1,l(エル)=3/2の場合に
本問の主張と矛盾する結果が生まれるので、
m,lは自然数であると解釈します。
命題Aを「aとbは互いに素である」
命題Bを
「a+b=nかつ1≦m≦a-1かつ1≦l≦b-1かつ
[nm/a]=[nl/b]を満たすm,lは存在しない」
とするとき
|
No.25371 - 2014/04/07(Mon) 23:31:44 |
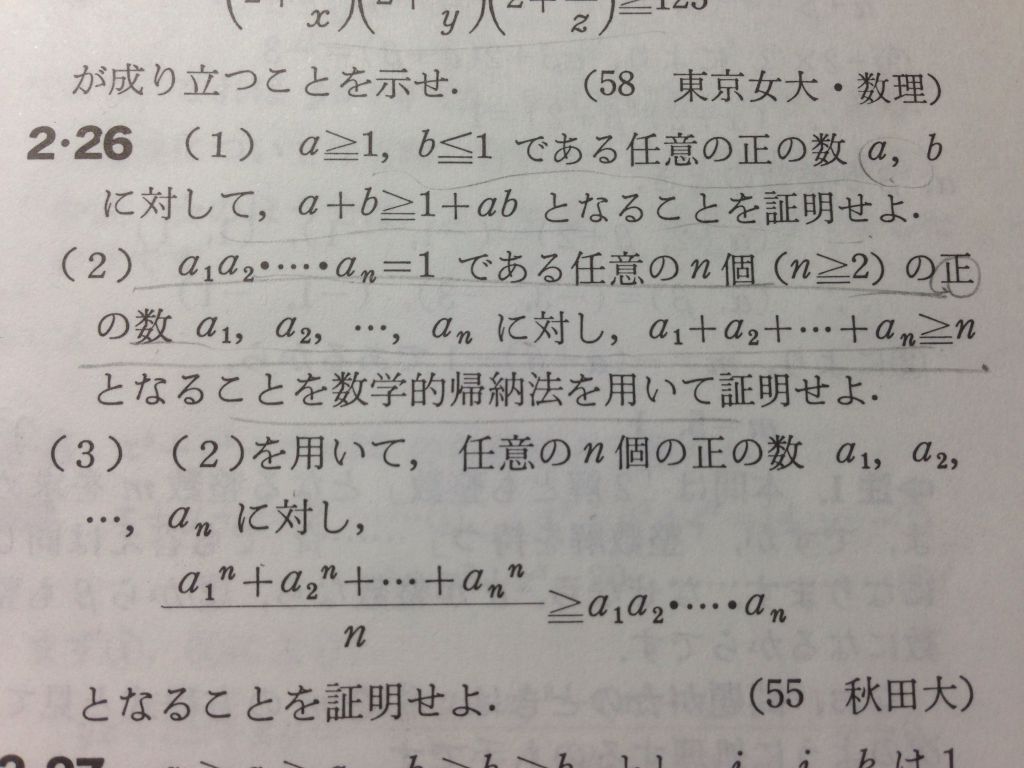
| ☆ Re: / angel | | | 解答としてどう書くか…は悩ましい所ですが、
実は図示すると明らかな問題ではあります。
a≧2, b≧2 でないと意味がないので、それを前提とすると、a,bが互いに素なので、少なくともa≠bです。
なのでa>bとして一般性を失わないとして…、添付の図をご覧ください。
青の点は(m,[bm/a])を、赤の点は([al/b],l)を示します。これらの点の、原点Oからの道なり距離 ( 例えば点(2,3)なら距離5 ) は、丁度 1〜a+b-2 までばらばらなのですが、この「道なり距離」っていうのは [nm/a] なり [nl/b] に他ならないのですね。
※ m+[bm/a]=[m+bm/a]=[nm/a], [al/b]+l=[al/b+l]=[nl/b]
まあ、なので [nm/a]=[nl/b] になることはない、と。
ミソは、a,bが互いに素なので、Oと(a,b)を結ぶ線分が、途中、格子点を一切通らないことです。
![]() |
No.25373 - 2014/04/08(Tue) 00:39:09 |
| ☆ Re: / tt | | | angelさん、確かにそう考えれば自明ではありますね笑
angelさんの回答のイメージを一般化して証明出来そうでできないです。もう少し頑張ってみます。
|
No.25380 - 2014/04/08(Tue) 15:15:59 |
| ☆ Re: / tt | | | みずきさん
mとlの存在を仮定して矛盾を示そうと試みていますがなかなか難しいです。多分aとbが互いに素でなくなる矛盾が生じるとはおもうのですが
|
No.25381 - 2014/04/08(Tue) 15:18:03 |
| ☆ Re: / みずき | | | 初見で思いついた方法を書きますね。
もっと簡潔に書けるかもしれません。
a+b=nかつ1≦m≦a-1かつ1≦l≦b-1かつ
[nm/a]=[nl/b]を満たす自然数m,nが存在する、と仮定します。
すると、
[nm/a]=[nl/b]=t
なる整数tが存在し、ガウス記号の定義により、
0≦nm/a-t<1⇔0≦nm-at<a
0≦nl/b-t<1⇔0≦nl-bt<b
ここで、
0<nm-at<a
0<nl-bt<b
の場合を考えます。
各辺を足し合わせると、a+b=nにより、
0<n(m+l)-tn<n⇔0<m+l-t<1
今、m,l,tは整数なので、m+l-tは整数。
よって、この場合はあり得ません。
よって、
nm-at=0
nl-bt=0
でなくてはいけないことが分かりました。
各辺を足し合わせると、
n(m+l)-tn=0⇔m+l=t
よって、
nm-at=0⇔nm-a(m+l)=0⇔al=m(n-a)⇔al=mb⇔a=mb/l
0≦l≦b-1
ですから、aとbは互いに素ではありません。
|
No.25382 - 2014/04/08(Tue) 15:51:17 |
| ☆ Re: / みずき | | | 最後のところ、
『1≦l≦b-1ですから』
とすべきでした。
|
No.25383 - 2014/04/08(Tue) 15:55:58 |
| ☆ Re: / tt | | | > 最後のところ、
> 『1≦l≦b-1ですから』
> とすべきでした。
なるほど、足し合わせるのですね!
その発想がありませんでした。足し合わせも有効な場合があるということも頭に入れておきます。ありがとうございました。
|
No.25384 - 2014/04/08(Tue) 16:05:48 |
|